石家庄网站建设备案星力游戏源码
目录
1.前置知识
准备工作
2.导入依赖
3.生产者
4.消费者
5.验证
验证Direct
验证Fanout
验证Topic
1.前置知识
rabbitmq有五种工作模式;按照有无交换机分为两大类
无交换机的:简单队列(一对一,单生产单消费)、工作队列(工作队列有轮训分发和公平分发两种模式)
有交换机:发布-订阅、路由模式、主题模式
准备工作
安装rabbitmq,并成功启动
2.导入依赖
<dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-amqp</artifactId>
</dependency>3.生产者
生产端项目结构:

逻辑:生产者只对交换机进行生产,至于队列绑定等放在消费端进行执行
BusinessConfig
定义了三个不同类型的交换机
direct类型:(当生产者往该交换机发送消息时,他必须指定固定的routingkey,当routingkey值为空,他也会匹配routingkey为空的队列)
fanout类型:(当生产者往该交换机发送消息时,他所绑定的队列都会收到消息,routingkey即使写了也会忽略,一般为空字符串)
Topic类型:(当生产者往该交换机发送消息时,他并不像direct指定固定的routingkey,可以进行模糊匹配,当该routingkey为空时,他会匹配routingkey为空的队列)
package com.zsp.quartz.queue;import lombok.extern.slf4j.Slf4j;
import org.springframework.context.annotation.Configuration;/*** @Author: ZhangSP* @Date: 2023/12/7 14:05*/
public class BusinessConfig {// 声明direct交换机public static final String EXCHANGE_DIRECT= "exchange_direct_inform";// 声明fanout交换机public static final String EXCHANGE_FANOUT= "exchange_fanout_inform";// 声明topic交换机public static final String EXCHANGE_TOPIC= "exchange_topic_inform";
}
TestProducer
生产消息
package com.zsp.quartz.queue;import com.alibaba.fastjson.JSON;
import com.zsp.quartz.entity.User;
import org.junit.Test;
import org.junit.runner.RunWith;
import org.springframework.amqp.rabbit.core.RabbitTemplate;
import org.springframework.beans.factory.annotation.Autowired;
import org.springframework.boot.test.context.SpringBootTest;
import org.springframework.test.context.junit4.SpringRunner;@SpringBootTest
@RunWith(SpringRunner.class)
public class TestProducer {@AutowiredRabbitTemplate rabbitTemplate;@Testpublic void Producer_topics_springbootTest() {//使用rabbitTemplate发送消息String message = "";User user = new User();user.setName("张三");user.setEmail("anjduahsd");message = JSON.toJSONString(user);// directrabbitTemplate.convertAndSend(BusinessConfig.EXCHANGE_DIRECT,"",message);// fanoutrabbitTemplate.convertAndSend(BusinessConfig.EXCHANGE_FANOUT,"",message);// topicrabbitTemplate.convertAndSend(BusinessConfig.EXCHANGE_TOPIC,"",message);}
}
4.消费者
消费者目录结构:

BusinessConfig内容解析:
①定义交换机类型
②配置交换机与队列的绑定关系
③通过容器工厂声明队列
package com.zsp.consumer.queue;
import com.rabbitmq.client.BuiltinExchangeType;
import com.rabbitmq.client.Channel;
import lombok.extern.slf4j.Slf4j;
import org.springframework.amqp.rabbit.connection.Connection;
import org.springframework.amqp.rabbit.connection.ConnectionFactory;
import org.springframework.beans.factory.annotation.Autowired;
import org.springframework.beans.factory.annotation.Qualifier;
import org.springframework.context.annotation.Configuration;import javax.annotation.PostConstruct;/*** @Author: ZhangSP* @Date: 2023/12/7 14:05*/
@Slf4j
@Configuration
public class BusinessConfig {// 声明directpublic static final String EXCHANGE_DIRECT= "exchange_direct_inform";public static final String QUEUE_DIRECT_EMAIL = "queue_direct_inform_email";public static final String QUEUE_DIRECT_SMS = "queue_direct_inform_sms";public void BindDirectEmail(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_DIRECT, BuiltinExchangeType.DIRECT.getType(), true);channel.queueDeclare(QUEUE_DIRECT_EMAIL, true, false, false, null);channel.queueBind(QUEUE_DIRECT_EMAIL, EXCHANGE_DIRECT, "");} catch (Exception e) {log.error("声明Direct->email队列时失败", e);}}public void BindDirectSms(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_DIRECT, BuiltinExchangeType.DIRECT.getType(), true);channel.queueDeclare(QUEUE_DIRECT_SMS, true, false, false, null);channel.queueBind(QUEUE_DIRECT_SMS, EXCHANGE_DIRECT, "123");} catch (Exception e) {log.error("声明Direct->sms失败", e);}}// 声明fanoutpublic static final String EXCHANGE_FANOUT= "exchange_fanout_inform";public static final String QUEUE_FANOUT_EMAIL = "queue_fanout_inform_email";public static final String QUEUE_FANOUT_SMS = "queue_fanout_inform_sms";public void BindFanoutEmail(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_FANOUT, BuiltinExchangeType.FANOUT.getType(), true);channel.queueDeclare(QUEUE_FANOUT_EMAIL, true, false, false, null);channel.queueBind(QUEUE_FANOUT_EMAIL, EXCHANGE_FANOUT, "");} catch (Exception e) {log.error("声明Fanout->email队列时失败", e);}}public void BindFanoutSms(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_FANOUT, BuiltinExchangeType.FANOUT.getType(), true);channel.queueDeclare(QUEUE_FANOUT_SMS, true, false, false, null);channel.queueBind(QUEUE_FANOUT_SMS, EXCHANGE_FANOUT,"");} catch (Exception e) {log.error("声明Fanout->sms失败", e);}}// 声明topicpublic static final String EXCHANGE_TOPIC= "exchange_topic_inform";public static final String QUEUE_TOPIC_EMAIL = "queue_topic_inform_email";public static final String QUEUE_TOPIC_SMS = "queue_topic_inform_sms";public static final String ROUTINGKEY_EMAIL="inform.#.email.#";public static final String ROUTINGKEY_SMS="inform.#.sms.#";public void BindTopicEmail(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_TOPIC, BuiltinExchangeType.TOPIC.getType(),true);channel.queueDeclare(QUEUE_TOPIC_EMAIL, true, false, false, null);channel.queueBind(QUEUE_TOPIC_EMAIL, EXCHANGE_TOPIC, ROUTINGKEY_EMAIL);} catch (Exception e) {log.error("声明Topic->email队列时失败", e);}}public void BindTopicSms(Channel channel) {try {channel.exchangeDeclare(EXCHANGE_TOPIC, BuiltinExchangeType.TOPIC.getType(),true);channel.queueDeclare(QUEUE_TOPIC_SMS, true, false, false, null);channel.queueBind(QUEUE_TOPIC_SMS, EXCHANGE_TOPIC,"");} catch (Exception e) {log.error("声明Topic->sms失败", e);}}// 声明队列@Autowired@Qualifier(value = "zspConnectionFactory")private ConnectionFactory connectionFactory;@PostConstructpublic void shengmingQueue() {try {Connection connection = connectionFactory.createConnection();Channel channel = connection.createChannel(false);BindDirectEmail(channel);BindDirectSms(channel);BindFanoutEmail(channel);BindFanoutSms(channel);BindTopicEmail(channel);BindTopicSms(channel);} catch (Exception e) {log.error("业务实例声明绑定队列报错:",e);}}
}
RabbitFactory内容解析:
①创建自定义连接工厂
②通过@Qualifier准确注入连接工厂,创建个性化容器工厂
package com.zsp.consumer.queue;import org.springframework.amqp.rabbit.annotation.EnableRabbit;
import org.springframework.amqp.rabbit.config.SimpleRabbitListenerContainerFactory;
import org.springframework.amqp.rabbit.connection.CachingConnectionFactory;
import org.springframework.amqp.rabbit.connection.ConnectionFactory;
import org.springframework.beans.factory.annotation.Qualifier;
import org.springframework.context.annotation.Bean;
import org.springframework.context.annotation.Configuration;@Configuration
@EnableRabbit
public class RabbitFactory {@Bean("zspConnectionFactory")public ConnectionFactory connectionFactory() {CachingConnectionFactory connectionFactory = new CachingConnectionFactory();// 设置RabbitMQ的连接信息,如主机名、端口号、用户名和密码等connectionFactory.setHost("localhost");connectionFactory.setPort(5672);connectionFactory.setUsername("root");connectionFactory.setPassword("root");return connectionFactory;}@Bean("rabbitListenerContainerFactory")public SimpleRabbitListenerContainerFactory rabbitListenerContainerFactory(@Qualifier("zspConnectionFactory") ConnectionFactory connectionFactory) {SimpleRabbitListenerContainerFactory factory = new SimpleRabbitListenerContainerFactory();factory.setConnectionFactory(connectionFactory);factory.setConcurrentConsumers(5);factory.setMaxConcurrentConsumers(10);return factory;}
}
ReceiveHandler内容解析:
监听绑定的队列消息
package com.zsp.consumer.queue;import com.alibaba.fastjson.JSONObject;
import com.rabbitmq.client.Channel;
import org.springframework.amqp.core.Message;
import org.springframework.amqp.rabbit.annotation.RabbitListener;
import org.springframework.stereotype.Component;@Component
public class ReceiveHandler {//监听自定义的Direct队列@RabbitListener(queues = BusinessConfig.QUEUE_DIRECT_SMS, containerFactory = "rabbitListenerContainerFactory")public void directSMS(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Direct队列->sms队列" + jsonObject);}@RabbitListener(queues = BusinessConfig.QUEUE_DIRECT_EMAIL, containerFactory = "rabbitListenerContainerFactory")public void directEmail(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Direct队列->email队列" + jsonObject);}//监听自定义的Fanout队列@RabbitListener(queues = BusinessConfig.QUEUE_FANOUT_SMS, containerFactory = "rabbitListenerContainerFactory")public void FanoutSMS(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Fanout队列->sms队列" + jsonObject);}@RabbitListener(queues = BusinessConfig.QUEUE_FANOUT_EMAIL, containerFactory = "rabbitListenerContainerFactory")public void FanoutEmail(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Fanout队列->email队列" + jsonObject);}//监听自定义的Topic队列@RabbitListener(queues = BusinessConfig.QUEUE_TOPIC_SMS, containerFactory = "rabbitListenerContainerFactory")public void TopicSMS(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Topic队列->sms队列" + jsonObject);}@RabbitListener(queues = BusinessConfig.QUEUE_TOPIC_EMAIL, containerFactory = "rabbitListenerContainerFactory")public void TopicEmail(String msg, Message message, Channel channel) {JSONObject jsonObject = JSONObject.parseObject(msg);System.out.println("Topic队列->email队列" + jsonObject);}
}5.验证
先启动消费者端,然后执行TestProducer
验证Direct
1.向routingkey为空的队列发消息

我们在消费者端配置了routingkey为空的队列,叫做 QUEUE_DIRECT_EMAIL

因此会打印出下面这条记录


2.向routingkey为123的队列发消息

我们在消费者端配置了routingkey为123的队列,叫做 QUEUE_DIRECT_SMS

因此会打出下面这条记录


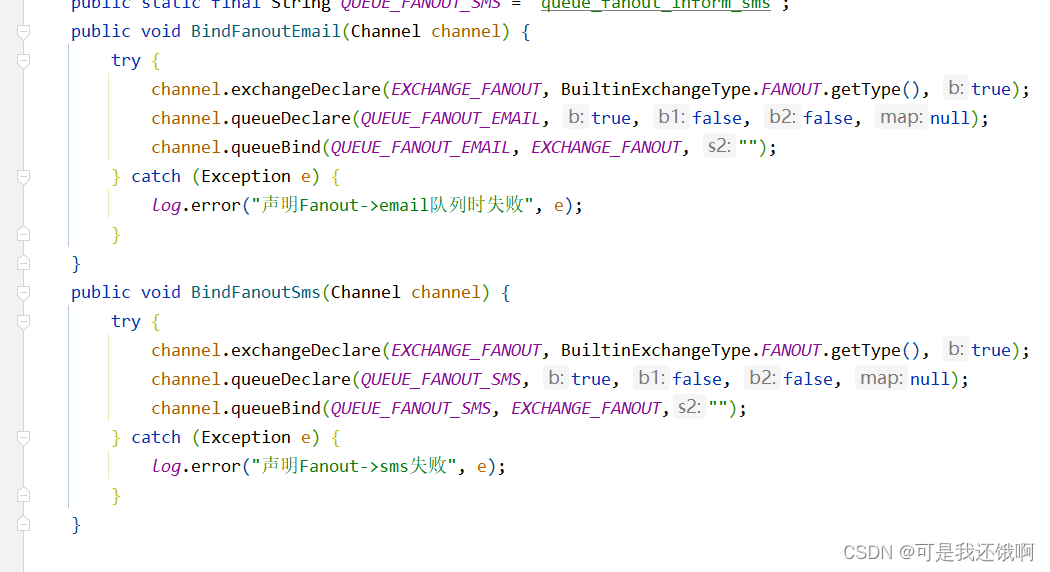
验证Fanout

谁跟我绑定了,我都发

验证Topic
模糊匹配routingkey

匹配sms队列

会把下面这个打印出来


需要注意的是如果我们没有自定义容器工厂的话,这个containerFactory可以不写
简单理解就是实例,也就是rabbitmq服务地址是在哪里,实例包括了域名、端口、账号、密码等。